We use cookies to make your experience better. To comply with the new e-Privacy directive, we need to ask for your consent to set the cookies. Learn more.


Feature Pack - External Synchronization
The synchronization of system components or production lines with several EtherCAT Segments can be done with different solutions:
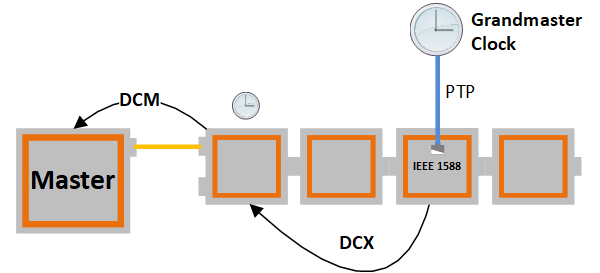
- Synchronization with an external grandmaster clock using IEEE 1588 protocol
- Synchronization by a bridge device.
Depending on the application the accuracy of the synchronization has different requirements. For the synchronization of two production lines often the accuracy in the range of milliseconds is enough.
However if two or more motion control networks should be synchronized it may be necessary to have the Sync-signals exact at the same time in all devices (e.g. for a network wide commutation information) - that means an accuracy better than a microsecond may be needed.
Within one EtherCAT Segment the Distributed Clocks (DC) mechanism can be used, to synchronize the network devices. DC offers accuracy much better than a microsecond.
The first device that should be synchronized is used as the reference clock for that segment.
The synchronization of several EtherCAT Segments with a high accuracy means that the DC reference clocks in the segments must be adjusted.
The leading clock is called Grandmaster clock. It can be an external Time information, e.g. GPS or DCF77 receiver (see Figure 27), but it can also be one of the DC reference clocks.
The synchronization of two or more EtherCAT segments can be done by a Bridge device as shown in this figure.
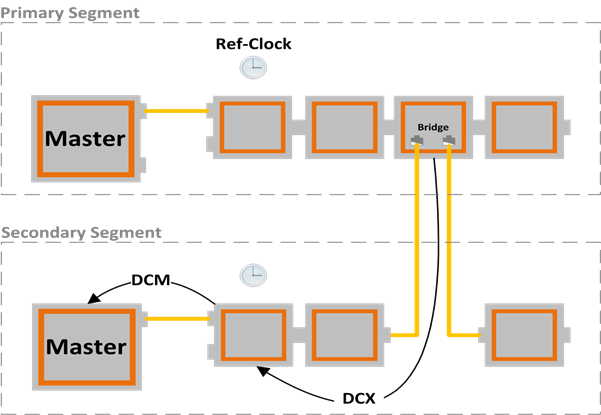
The Bridge has two EtherCAT connections (internal two EtherCAT Slave Controllers are used). The primary port is connected to the first segment; the secondary port is connected to the second segment. One of the two ports can be configured to be the leading time reference. The Bridge can calculate the time difference and offers the TimeControlValue to the Master. The Master can then adjust the Reference Clock. During startup the two segments can be powered-on at different times. That means that there will be an absolute time difference between the two segments.
To synchronize the Secondary Segment two software algorithms are involved:
- DCX: Synchronize the reference clock to bridge device
- DCM: Synchronize the Master timer to reference clock