We use cookies to make your experience better. To comply with the new e-Privacy directive, we need to ask for your consent to set the cookies. Learn more.



Software Architecture
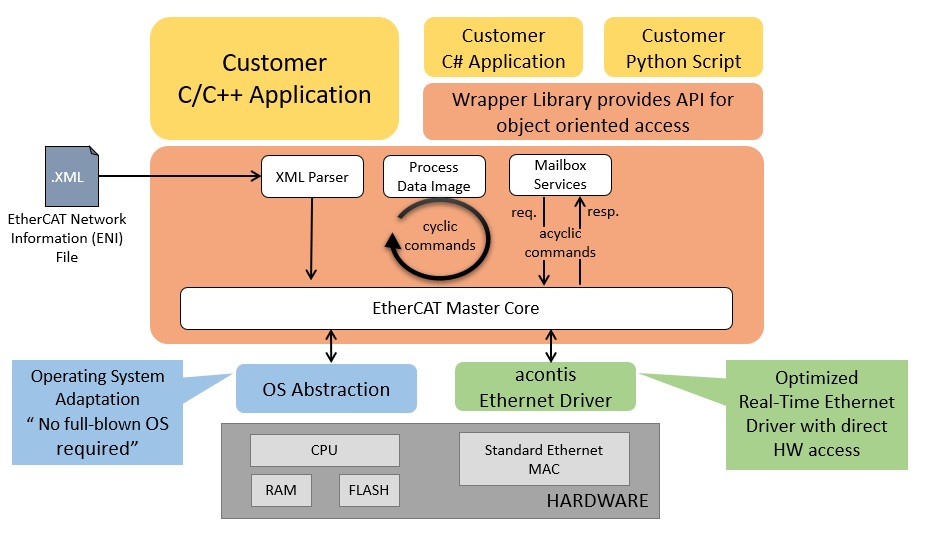
- Application Programming Interface (API): Programming the EtherCAT MainDevice core in C/C++, C# and Python.
- EtherCAT MainDevice Core: The key EtherCAT MainDevice functionality in the core layer. All protocol handling, e.g. process data transfer and mailbox protocols (CoE, EoE, FoE, AoE, SoE) are executed here. This is complemented by sophisticated diagnosis features.
- Real-time Ethernet Driver: Data exchange between MainDevice and SubordinateDevice (SubDevice), formerly Slave. Zero-copy and/or polling techniques together with the core layer are supported to achieve best real-time performance and minimize CPU load.
- MainDevice and Network Configuration: The integrated XML parser supports the EtherCAT Network Information (ENI) file defined in the EtherCAT specification.
- Operating System Layer: The only OS specific layer. All operating system calls are executed here. To achieve best performance the most functions can be implemented using simple "C"-language macros.
For further information https://www.acontis.com/en/ethercat-master.html
Evaluation Version https://www.acontis.com/en/ethercat-support-eval-request.html
Evaluation Free https://www.acontis.com/en/ethercat-support-eval-request.html
Features according to ETG.1500 Master Classes
The ETG (EtherCAT Technology Group) has defined two EtherCAT Master Classes (ETG.1500) with a well defined set of Master functionalities:
Class A: Standard EtherCAT Master Device
Class B: Minimum EtherCAT Master Device
Additional Functionality, which can be considered to be optional, is described by Feature Packs. The Feature Pack describes all mandatory master functionality for a specific feature, e.g. Cable Redundancy.
Basic Features
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| Service Commands | Support of all commands | X | X |
| IRQ field in datagram | Use IRQ information from Slave in datagram header | X | X |
| Slaves with Device Emulation | Support Slaves with and without application controller | X | X |
| EtherCAT State Machine | Support of ESM special behavior | X | X |
| Error Handling | Checking of network or slave errors, e.g. Working Counter | X | X |
| VLAN | Support VLAN Tagging | X | -- (*2) |
| EtherCAT Frame Types | Support EtherCAT Frames | X | X |
| UDP Frame Types | Support UDP Frames | -- (*1) | -- (*2) |
| Multiple Instances | One control system operating multiple networks | X | X |
Process Data Exchange
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| Cyclic PDO | Cyclic process data exchange | X | X |
| Multiple Tasks | Different cycle tasks Multiple update rates for PDO | X | X |
| Frame repetition | Send cyclic frames multiple times to increase immunity | -- (*1) | -- (*2) |
Network Configuration
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| Online scanning | Network configuration functionality included in EtherCAT Master | X | X |
| Reading ENI | Network Configuration taken from ENI file | X | X |
| Compare Network configuration | Compare configured and existing network configuration during boot-up | X | X |
| Explicit Device identification | Identification used for Hot Connect and prevention against cable swapping | X | X |
| Station Alias Addressing | Support configured station alias in slave, i.e. enable 2nd Address and use it | X | X |
| Access to EEPROM | Support routines to access EEPROM via ESC register | X | X |
Mailbox Support
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| Support Mailbox | Main functionality for mailbox transfer | X | X |
| Mailbox Resilient Layer | Support underlying resilient layer | X | X |
| Multiple Mailbox channels | X | X | |
| Mailbox polling | Polling Mailbox state in slaves | X | X |
CAN application layer over EtherCAT (CoE)
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| SDO Up/Download | Normal and expedited transfer | X | X |
| Segmented Transfer | Segmented transfer | X | X |
| Complete Access | Transfer the entire object (with all sub-indices) at once | X | X |
| SDO Info service | Services to read object dictionary | X | X |
| Emergency Message | Receive Emergency messages | X | X |
Ethernet over EtherCAT (EoE)
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| EoE protocol | Services for tunneling Ethernet frames. includes all specified EoE services | X | X |
| Virtual Switch | Virtual Switch functionality | X | X |
| EoE Endpoint to Operation Systems | Interface to the Operation System on top of the EoE layer | FP (*1) | FP (*2) |
File access over EtherCAT (FoE)
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| FoE protocol | Support FoE Protocol | X | X |
| Firmware Up-/Download | Password, FileName should be given by the application | X | X |
| Boot State | Support Boot-State for Firmware Up/Download | X | X |
Servodrive-Profile over EtherCAT (SoE)
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| SoE Services | Support SoE Services | X | X |
ADS over EtherCAT (AoE)
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| AoE Protocol | Support AoE Protocol | X | X |
Vendor over EtherCAT (VoE)
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| VoE Protocol | External Connectivity supported | X | X |
Synchronization with Distributed Clock (DC)
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| DC support | Support of Distributed Clock | X | -- (*2) |
| Continuous Propagation Delay compensation | Continuous Calculation of the propagation delay | X | -- (*2) |
| Sync window monitoring | Continuous monitoring of the Synchronization difference in the slaves | X | -- (*2) |
Slave-to-Slave Communication
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| via Master | Information is given in ENI file or can be part of any other network configuration. Copying of the data can be handled by master stack or master’s application. Required to support FSoE Safety slaves. | X | X |
Master information
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| Master Object Dictionary | Support of Master Object Dictionary (ETG.5001 MDP sub profile 1100) | FP (*1) | FP (*2) |
Feature Packs
| Feature name | Short description | Class A | Class B |
|---|---|---|---|
| Cable Redundancy | Stay operational in case of cable break between two slaves | FP | FP |
| Hot Connect | Add or remove additional slave devices during bus communication is in progress. Newly added slaves are automatically transferred into the OPERATIONAL state. | FP | FP |
| TCP-Server and Remote API | The TCP-Server together with the Remote API Context.Scope.Library allows accessing EC-Master from a remote system | FP | FP |
| EoE Endpoint | The interface allows sending and receiving Ethernet frames to/from the EtherCAT network | FP | FP |
Feature ID: Unique identification used in ETG.1500 EtherCAT Master Classes
FP: Available as Feature Pack
*1: According to ETG.1500 Master Classes not mandatory for Class A
*2: According to ETG.1500 Master Classes not mandatory for Class B
New Features
Advantages
- High performance and low CPU load to achieve fast update rates.
- Ready-to-run for many operating systems.
- Supporting the CPU architectures x86 (32 Bit und 64 Bit), ARM (32 Bit und 64 Bit) und PowerPC (PPC).
- Available for many processors from Intel, Texas Instruments, ST, Broadcom, Nvidia, Renesas, NXP, Xilinx and Infineon.
- Together with our services you get professional partnership setting up your custom control system. On request you may get the complete system integration.
- Reliable and robust implementation. For example, the EC-Master Stack is running in the KUKA Robot Control and in controllers from Yaskawa, Lenze and Omron.
Tecnologix offers support which is directly handled by development team. Do not hesitate to get in touch with our experts.
Just ask here
We found other products you might like!