Utilizziamo i cookie per rendere migliore la tua esperienza di navigazione. Per rispettare la nuova direttiva sulla privacy, è necessario chiedere il tuo consenso per impostare i cookie. Per saperne di più.



PLUG & PLAY
Connect up to 4 x CAN to receive / transmit the data via 1 x CAN (or USB) - no configuration requiredCOMPACT
7 x 2 x 5 CM. 75G. 7 LEDs. Supply via DB9/USB. 5-26 V. Mounting flanges. USB for config/FW and streamingPRO SPECS
4 x CAN FD. Basic galvanic isolation. Silent mode. Zero data loss. 1 ms precision. Error frame support.MUX MODE
Transport 4 x CAN via 1 x CAN. Easily demux data. Optionally transport via CAN FD for max throughputSEAMLESS
Fully supported by CANedge/CANmod software/API tools. As if directly interfacing the 4 x CAN busesCONFIGURABLE
Configure filters, prescalers, transmit lists, CAN IDs, bit rates and more via JSON config and GUI
Why is the CANmod.router useful?
In many use cases you need to receive/transmit data from multiple CAN buses - but you only have one CAN interface available. This is a common challenge in data acquisition, display integrations, network extensions and more.
For example, the CANedge lets you log 2 x CAN - but what if you need to log e.g. 5 x CAN?
You might then consider the below:
- Join CAN buses: Not an option (different bit-rates, ID conflicts, busload, …)
- Change logger: Too expensive (most loggers with >2 x CAN cost thousands of EUR)
- Use 3 x CANedges: Costly/complex (3 x logs, imperfect cross-device time sync)
None of the above are optimal - but the CANmod.router now offers the ideal solution. Learn more below!
MUX MODE
Transport muxed CAN data through tunnels
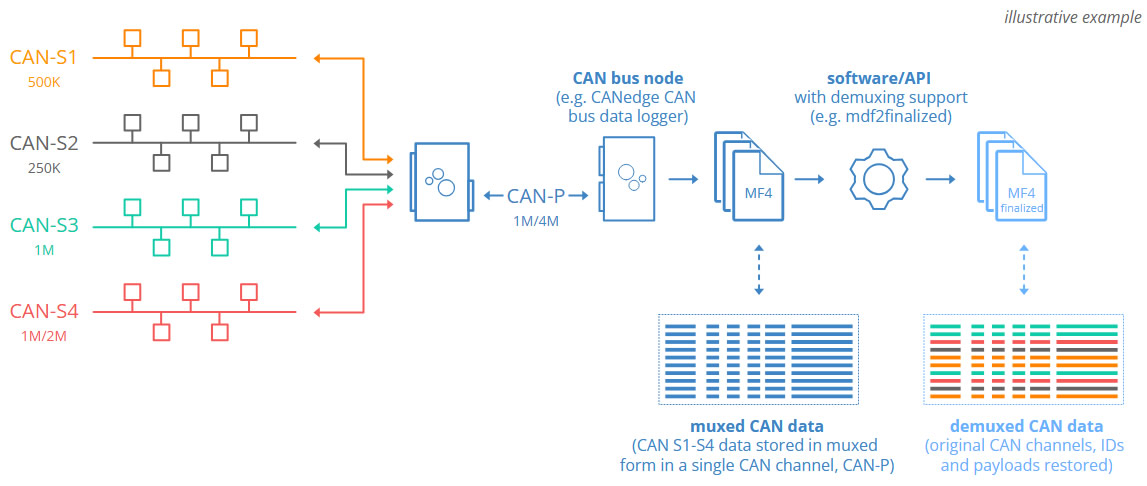
In mux-mode, traffic from/to the secondary CAN buses is routed through the primary CAN bus via tunnels (CAN frames that transport the original data). Muxed data received by a user CAN node (e.g. CANedge) can be easily demuxed to its original form via software/API tools.
Interface four CAN buses with just one CAN bus (or USB)
Receive/transmit data from/to 4 x CAN buses via 1 x CAN bus (or USB) - e.g. for use by CAN loggers, ECUs or via USB streaming.
- 4 x CAN (incl. CAN FD) with basic galvanic isolation
- Power via DB9 (5-26 V and DB9 cables) or USB (5V)
- Independently configure each secondary CAN interface
- Optional silent mode and independently customizable bit rates
- Advanced message filters and prescalers
- Configure transmit lists - and/or control via primary CAN
- Support for CAN error frame logging
- Quickly connect 4 x CAN via DB25-to-4x-DB9 adapter cable
- Daisy chain multiple modules for 8, 12, 16, ... CAN channels
 via the DB25 connector - and route the data through one CAN bus via the DB9 connector (or via USB)")

 - letting you log 1 x CAN (via CH1) + 4 x CAN (via CH2)")

, as well as update/configure the device")


Example: CANedge + CANmod.router = 5 x CAN bus data logger
The CANedge supports 2 x CAN. By adding a CANmod.router, you can now log 1 x CAN (CH1) + 4 x CAN (CH2) - or beyond.
- Power the CANmod.router via the CANedge 2nd port 5V
- Maximise 4 x CAN throughput via CAN FD routing (mux-mode)
- Easily demux routed data via MF4 converter or Python API
- Control transmission on the 4 x CAN via CANedge
- Use daisy chaining to log 1 + 8 x CAN, 1 + 12 x CAN (or beyond)
Tip: Check out muxed/demuxed MF4 sample data below.
How to deploy a CANedge + CANmod.router?
We provide a step-by-step guide for this setup in the CANedge Intro - below we provide a brief recap:
- Connect the CANmod.router to the CANedge 2nd port
- Set the CANedge CAN CH2 bit-rate to 1M/4M
- Set the CANedge 2nd port 5V power supply to enabled
- Optionally set bit-rates and filters on the CANmod.router
The CANedge can now record 1 x CAN (via CH1) + 4 x CAN (via CH2). The regular CH1 data and 'muxed' CH2 data is stored by the CANedge in MDF log files (*.MF4).
To DBC decode and analyze the data, you need to first demux the CH2 data. This can be done via the CANedge MF4 converter 'mdf2mdf' - similar to how you 'decompress' compressed MDF files. For details, see below.
Note: If you daisy chain CANmod.routers the process is the same, except that you set unique IDs per device.
How does the software demuxing work?
Tip: See also our sample MF4 data above.
Let us assume you use a CANedge + CANmod.router to log 1 x CAN (via CH1) + 4 x CAN (via CH2) via mux-mode.
Structure of the muxed MF4 data
If you open the raw MF4 in asammdf, you will see the CAN CH1 data stored as normal - while CAN CH2 contains muxed data. The muxed data comprises CAN FD frames, with the original 4 x CAN-S IDs/data packaged in the payload.
How to demux the data
To work with the data we need to first demux it. The simplest way is to use the MF4 converter 'mdf2mdf'. This can convert raw MF4 files (or MFC/MFE/MFM) to 'finalized' MF4 files. It can be used to decompress, decrypt - and demux - log files. The tool can be used via drag & drop, the CLI and in scripts.
If you open the demuxed MF4 you now see the following:
- CAN CH1 is unchanged
- CAN CH2 is now empty
- CAN CH3-CH6 contain the original 4 x CAN-S frames
This is identical to what you would record if the CANedge itself had more CAN channels, with the original CAN IDs and payloads of the 4 x CAN-S unpacked into CAN CH3-CH6.
Note: You can also use our Python API to demux MF4 files.
Support in other software/APIs
The demuxed MF4 files are fully supported in all our software/API tools, incl. the asammdf GUI, MF4 converters, MF4 decoders, MATLAB, Python, Vector tools, dashboards etc.
Special case: Other device on CH2
You may connect both a CANmod.router and e.g. a CANmod.temp to a CANedge CH2. Here, the demuxed MF4 will include the CANmod.temp data in CAN CH2.
Special case: 2 x CANmod.router
If you need to record 1 + 8 x CAN, you can daisy-chain two CANmod.routers on CH2. One must be configured to use a different CAN ID for the muxed data (e.g. 0x11).
During demuxing, you can specify how to map IDs - e.g. ID 0x10 to CH3-CH6 and ID 0x11 to CH10-CH13.
Use Cases
The CANmod.router can be installed standalone in any CAN bus system - including e.g. as an add-on for the CANedge. Further, it can be used as a powerful 4 x CAN FD to USB interface.
OEM CAN bus telematics with 5 x CAN channels
Need to collect data from 5 x CAN buses across your vehicle fleet?
As an automotive OEM, you may want to use the CANedge3 to collect CAN data and upload it via 3G/4G to your own AWS S3 bucket. But what if you need to log e.g. 5 x CAN per vehicle? Here you can simply add the CANmod.router to the CANedge 2nd port in mux-mode to log 1 + 4 x CAN. Using the DB25-to-4x-DB9 adapter, you can quickly connect the 4 x CAN using our standard DB9 adapters. When the MF4 log files are uploaded to your cloud, they can be automatically 'demuxed' and DBC decoded via Lambda functions for e.g. creation of Parquet data lakes and Grafana dashboards.
Development & diagnostics via USB
Need to stream data from/to 4 x CAN / CAN FD via USB?
In development & diagnostics it is often useful to be able to stream data from/to multiple CAN buses in parallel. This normally requires very large/expensive CAN-to-USB interfaces and expensive software tools. However, with the CANmod.router you can stream 4 x CAN (incl. CAN FD) via USB using the 100% free SavvyCAN GUI or Python API. The latter enables any type of custom integration - e.g. visualization in Grafana-MQTT dashboards. Simply power the CANmod.router via USB and connect it to your CAN buses to start streaming. You can of course connect multiple CANmod.routers via separate USB COM ports to stream e.g. 8 x CAN, 12 x CAN etc.
Unlimited CAN channel logging via daisy chaining
Need to log 1 + 8 x CAN, 1 + 12 x CAN or beyond?
By using a single CANedge + CANmod.router, you can easily record 5 x CAN in total. However, you can also go beyond this by daisy chaining 2, 3 or more CANmod.routers. You can add filters/prescalers on each secondary CAN interface to customize what IDs you record (at what frequency), ensuring your CANedge can record everything without frame loss - and that your log file size remains optimized.
Physical CAN bus extension from remote area
Need to transport CAN data over long distances?
In some use cases, you may want to interface with CAN buses that are far away. For example, you may want to interface with 3 x maritime vessel engines from a bridge (e.g. for integration with a display) - but the cable distance would be 40 meters. It is not recommended to extend existing CAN buses beyond a few meters. However, you can safely deploy one CANmod.router (mux-mode) in the engine room to record the 3 x CAN - and connect it via a 40 meter DB9-DB9 cable to another CANmod.router (mux-mode) at the bridge. The muxed data from the engine room is demuxed in real-time by the bridge device. As a result, you can now interface each engine room CAN bus via the bridge CANmod.router's DB25 connector - as if you had a direct connection. You can even convert the bit-rates of each engine CAN bus in the process or filter/prescale some of the data if preferred.
FAQ
How does it work?
The CANmod.router is a small device that lets you connect up to four separate, isolated CAN buses (incl. CAN FD) via the DB25 connector. The data from/to these four CAN buses (CAN-S1, CAN-S2, CAN-S3, CAN-S4) is then 'routed' by the module through a single CAN bus (CAN-P) - or via a USB interface.
In practice, this means that you can interface with four separate CAN buses through a single interface - enabling powerful use cases, such as recording more CAN channels with a CAN logger (like the CANedge). For details see the CANmod.router Docs
Why choose the CANmod.router?
The CANmod.router is an extremely powerful device. Let us illustrate this via the two most common use cases:
CANedge add-on: Log 5 x CAN
The CANmod.router lets you log 5 x CAN via one CANedge. Previously, you had to use 3 x CANedge units with multiple downsides:
- Adding two 'extra' CANedge units is 300-1000 EUR more costly vs adding a CANmod.router
- With three CANedge units, your data is split across three SD cards, MF4 files etc - making data/device management complex
- The best cross-device time sync precision is 400 ms (via internal GPS) - versus 1 ms via the CANmod.router
4 x CAN-USB interface
The CANmod.router can be used as a 4 x CAN-to-USB interface (incl. CAN FD). This is powerful for multiple reasons:
- The CANmod.router is 50%+ lower cost vs. comparable CAN-USB interfaces
- The CANmod.router is 50%+ more compact vs. comparable CAN-USB interfaces
- The CANmod.router comes with 100% free software/API tools for streaming
- The software/API tools let you DBC decode and visualize data in real-time
- SavvyCAN lets you receive/send data from/to all 4 x CAN buses in one GUI window
- The Python API enables easy integration with custom systems like Raspberry Pis - e.g. for field deployments
In short, the CANmod.router offers a ton of functionality in a single device.
Performance considerations (CANedge + CANmod.router)
Note: The numbers stated below are preliminary/indicative and may change.
A common use case is to log 5 x CAN with a CANedge + CANmod.router - here we discuss performance considerations.
CAN channels
You can record any number of CAN channels with one CANedge by adding a daisy chain of CANmod.routers. You can add e.g. 10 x CANmod.routers to log 40+ CAN channels - the limitation is purely related to the combined frames/second (see below).
If you daisy chain CANmod.routers on the CANedge 2nd port, you may need to consider if the 5V supply is sufficient. If all CAN-S interfaces are in 'Monitoring' mode then it will suffice. If not, you may need to consider a separate supply.
Frames/second considerations
The primary thing to consider is the total #frames/second you need to record across all of the CAN channels.
We recommend to stay below 6,000 frames/second in total (after filters/prescalers).
- 90%+ of use cases will have far below 6,000 frames/second across 5 x CAN - even without filters/prescalers
- Channel distribution is not relevant - it could e.g. be 1 x 4,000 frames/second + 4 x 500 frames/second (or any other mix)
- The performance limit is higher - the 6,000 frames/second is mainly based on practical considerations (see below)
- During the split-second creation of a new log file, the CANedge may loose frames if recording at very high data rates
Using filters and prescalers
Even if the combined #frames/second exceeds the limit, this is not necessarily an issue at all. The CANmod.router lets you configure filters and prescalers across each of the secondary CAN channels (similar to the CANedge). This means that you can record 4 x CAN channels that have a combined load of e.g. 10,000 frames/second - as long as you filter & prescale this sufficiently.
Practical considerations on file size, SD storage and upload speed
If you do record ~6,000 frames/second 24/7 you will accumulate 5+ MB/min (compressed), 300+ MB/hour, 7+ GB/day and 200+ GB/month. In other words, a CANedge with 32 GB will only store ~5 days of data before it deletes old files to free up space.
Of course, you can get around this by using a CANedge2/3 to upload log files when created. However, in practice the upload speed may make it difficult to offload data fast enough if you go beyond 6,000 frames/second (in particular in intermittent coverage).
To recap: We recommend to stay below 6,000 frames/second - and to use filters, prescalers and compression to optimize file size.
How to determine your combined #frames/second?
You may wonder if your use case can be handled by the CANedge + CANmod.router. The short answer is "yes!" in 95%+ of cases.
As explained, the limitation to consider is the #frames/second you need to log (after filters/prescalers) across all CAN buses.
To determine this, we recommend the below process:
- Record 5 min from each CAN bus with no filters via the CANedge CH1
- Convert each MF4 log file to CSV via our mdf2csv converter
- Open each CSV in Excel and note the #frames (count) and #seconds (last vs. first)
- Sum up the #frames/second across all CAN channels
If your total #frames/second is below ~6,000 then you are OK and it is mainly a matter of optimizing file size when you deploy.
If your total #frames/second is above ~6,000 then review each CAN bus to determine what messages can be filtered out or prescaled. After accounting for this, revisit the combined #frames/second to see if it is within the limits.
You can of course contact us for sparring on this.
Which adapter cables should I use?
We offer a number of useful adapter cables as options for the CANmod.router:
DB9-DB9/DB9 (Y splitter): This can e.g. be used to connect a CANmod.router to a CANedge 2nd port, enabling the CANedge to record 4 x CAN on CAN CH2. Further, you can add additional Y-splitters if you need to daisy chain more CANmod devices.
DB25-to-4x-DB9: This adapter can be used with the CANmod.router to enable the connection of four separate CAN buses. The advantage of this adapter is that the DB9 pinouts match the CiA 303-1 standard (like the CANedge DB9 connectors), meaning that you can directly use all of our standard DB9 adapter cables, such as our DB9-OBD2, DB9-J1939, DB9-M12 etc. You can even use dual-channel adapters like our J1939-DB9/DB9, OBD2-DB9/DB9 and DT06-DB9/DB9 adapters.
| GENERAL | |
|---|---|
| Functionality | The device routes data from four isolated CAN buses (incl. FD) to one primary CAN bus (or USB) |
| Included | CANmod.router module and USB dust cover (DB25-to-4x-DB9 adapter and USB adapter not included) |
| Firmware | Supports free firmware updates via USB for adding features |
| Configuration | Configuration files based on the popular open source JSON schema concept (similar to the CANedge) |
| Software | Free open source editor tool for easy device configuration (offline/online version available) |
| Free open source SavvyCAN GUI for streaming of raw / DBC decoded data via USB | |
| Free open source Python API for streaming of raw / DBC decoded data via USB | |
| Safety | CE, FCC, IC and RoHS certified (see the Docs for certificates) |
| Warranty | 1-year warranty |
| Support | Free, fast & high quality support |
| Origin | Denmark |
| ROUTER MODES | |
| Mux-Mode | Traffic from/to secondary CAN buses is muxed and transported through 'tunnels' via primary CAN bus |
| Demuxing done via software/API tools to restore original CAN frames (channel IDs, CAN IDs, payloads) | |
| - CANmod software/API with demuxing: SavvyCAN, USB Python API | |
| - CANedge software/API with demuxing: MF4 Python API, mdf2mdf (and hence all CANedge tools) | |
| CAN BUS (CAN-S) | |
| Channels | 4 x CAN channels (incl. CAN FD support) |
| Isolation | Basic galvanic isolation (easily connect CAN buses not subject to high voltage differences) |
| Standard | ISO 11898: Compliant with CAN (between 5K and 1 Mbit/s baud rates) and CAN FD (1M, 2M, 4M, 5M) |
| Protocols | Receive/transmit raw data from/to CAN based protocols (J1939, CANopen, NMEA 2000, OBD2, UDS, ...) |
| Identifiers | Compliant with CAN specifications 2.0A (11-Bit ID) and 2.0B (29-Bit ID) |
| Retransmission | Retransmission of frames that have lost arbitration or been disturbed by errors |
| Transceiver Protection | Protection: +/- 25kV HBM ESD, +/-12kV IEC ESD, +/-14 V bus fault, short circuit |
| Common mode input voltage: +/-12V | |
| TXD dominant timeout (prevents network blocking in the event of a failure) | |
| CAN BUS (CAN-P) | |
| Channels | 1 x CAN channel (incl. CAN FD support) |
| Modes | The device can either broadcast the data onto the CAN bus - or provide it on-request |
| Standard | ISO 11898: Compliant with CAN (between 5K and 1 Mbit/s baud rates) and CAN FD (1M, 2M, 4M, 5M) |
| Identifiers | Compliant with CAN specifications 2.0A (11-Bit ID) and 2.0B (29-Bit ID) |
| Termination | Termination can be toggled via switch below DB9 connector |
| Retransmission | Retransmission of frames that have lost arbitration or been disturbed by errors |
| Transceiver Protection | Protection: +/- 25kV HBM ESD, +/-12kV IEC ESD, +/-14 V bus fault, short circuit |
| Common mode input voltage: +/-12V | |
| TXD dominant timeout (prevents network blocking in the event of a failure) | |
| CONFIG (CAN-S) | |
| Independence | Each secondary CAN channel can be independently configured (router mode is set globally) |
| Bit Rate | Select between standard bit rates (5K to 1M) or use custom bit-timing |
| Bit-Rate Auto-Detect | Bit rates can be set manually (auto-detection pending FW) |
| Silent Mode | Configurable silent mode: Restricted (acknowledge only) or monitoring (zero transmission) |
| Filters | 32 regular/extended ID filters per channel (mask, acceptance, rejection) |
| Prescalers | Prescale CAN frames to record e.g. by time (per X ms) or by data (e.g. if byte X or Y changes) |
| Transmit | Transmit lists of up to 16 CAN frames per channel (single-shot/periodic) |
| Transmission can also be directly controlled from the CAN-P interface | |
| CAN Error Frames | Support for logging CAN error frames (bit-stuffing, form, CRC, bit, acknowledgement) |
| CONFIG (CAN-P) | |
| Bit Rate | Select between standard bit rates (standard: 5K to 1M, FD: 1M to 4M) or use custom bit-timing |
| Identifier Customization | Individually configure each CAN ID (11-bit or 29-bit) |
| OTHER | |
| Precision | Cross-channel precision of 1 ms |
| Frames/Second | Mux-mode: Route 8,000+ frames/second (Classical CAN) - see FAQ for details |
| ELECTRICAL | |
| Input Supply | +5V to +26V DC via the DB9 connector (power via pin 1 or pin 9) |
| Alternatively power via USB (for updating firmware/config or for streaming data in real-time) | |
| Power Consumption | Extremely low (<1W) - no risk of battery drainage |
| Protection | Reverse voltage protection on CAN-bus supply |
| Transient voltage event protection on supply lines | |
| MECHANICAL | |
| Enclosure & Weight | Compact aluminium enclosure: 65 x 48 x 24 mm (W x L x H excl. flanges & connectors). 75 grams |
| Connector (Front) | 1 x Standard D-sub 9 (DB9) connector |
| Connector (Back) | 1 x D-sub 25 (DB25) connector |
| Pin-Out | See the product manual for the DB9/DB25 connector pin-outs |
| USB | Standard mini USB connector for config/FW updates and streaming (USB cable available as option) |
| LEDs | Module status via 7 external LEDs: Power, CAN-P, Memory, CAN-S1, CAN-S2, CAN-S3, CAN-S4 |
| Temperature | Operating temperature: -25degC to +70degC |
| IP Rating | IP Rating 40 |
| Mounting | Module can be mounted via e.g. velcro strips or mounting kit |
Tecnologix offre supporto gestito direttamente dal Team di sviluppo.
Non esitare a metterti in contatto con i nostri esperti.
Basta chiedere qui
Non esitare a metterti in contatto con i nostri esperti.
Basta chiedere qui